
Publications

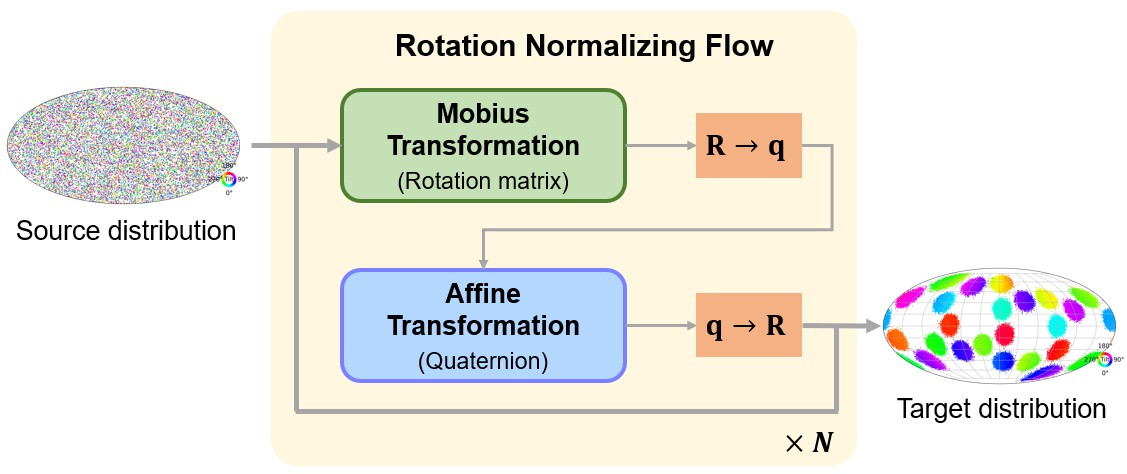
Delving into Discrete Normalizing Flows on SO(3) Manifold for Probabilistic Rotation Modeling
CVPR2023 [PDF] [Project] [Code]
We propose a discrete normalizing flow on SO(3) manifold, through which one can not only effectively express arbitrary distributions on SO(3), but also conditionally build the target distribution given input observations.